

فهرست این مقاله ( با کلیک روی هر عنوان به آن قسمت منتقل می شوید)
انواع مدل انکودر های مختلف
انکودر وسیله ای الکترومکانیکی است که مشخصات حرکت از جمله سرعت، مکان و جهت چرخش را تبدیل به سیگنال الکتریکی می کند که این سیگنال می تواند توسط یک کنترلر ، مانند PLC خوانده شود. این وسیله یک سیگنال بازخورد ارسال می کند که می تواند برای تعیین موقعیت، سرعت یا جهت استفاده شود به اینصورت که کنترلر می تواند از این اطلاعات، برای ارسال فرمان برای یک عملکرد خاص، مانند افزایش سرعت یا تغییر جهت موتور در دستگاه استفاده کند.

انکودر ها از روش های مختلفی برای ایجاد سیگنال استفاده میکنند، از جمله: مکانیکی، مغناطیسی، مقاومتی، و نوری.
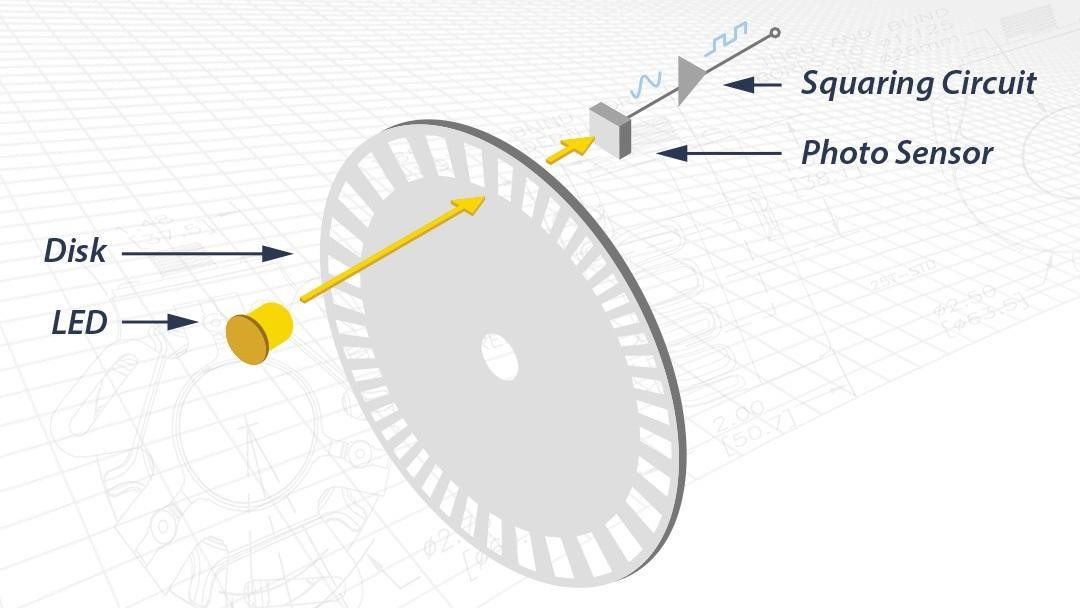
در سنجش نوری که از همه بیشتر مورد استفاده است، این وسیله فیدبکی را بر اساس قطع نور، همانطور که در شکل نشان داده شده است، ارائه می دهد.
پرتو نور ساطع شده از یک LED، از دیسک انکودر که با خطوط مات شبیه پره های چرخ دوچرخه طراحی شده است، عبور می کند. با چرخش شفت انکودر، پرتو نور از خطوط مات روی دیسک این وسیله عبور میکند و سپس توسط ردیاب نوری سیگنال آن دریافت میشود. این سیگنال به این صورت رمزگذاری میشود که عبور نور پالس فرمان on و عدم عبور نور پالس off را به کنترلر ارسال می کند که سپس این وسیله سیگنال را برای تولید عملکرد مورد نظر ارسال می کند.
انواع مختلفی از این وسیله وجود دارد اما به طور پایه ای انکودرها شامل دو دسته میشوند که عبارت اند از:
انکودر افزایشی
انکودر افزایشی، همان طور که از نامش هم پیداست به صورت افزایشی کار کدگذاری را انجام می دهد. نکته ای هم که در این انکودر بسیار مهم است این است که بعد از هربار قطع و وصل جریان برق موقعیت قبلی خود را گم می کند و جایگاه فعلی اش را صفر در نظر میگیرد.
این وسیله فیدبک بسیار خوبی برای سرعت و موقعیت موتور ارائه میکند و از آنجایی که ساختار ساده تری دارد، نسبتا ارزان می باشد.
نحوه کار انکودر افزایشی
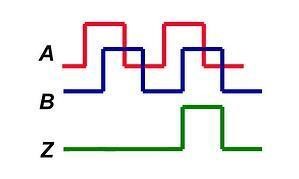
انکودر افزایشی مقدار مشخصی از پالسها را در یک دور چرخش این وسیله ارسال میکند. خروجی می تواند یک خط تک پالس (کانال A) یا دو خط پالس (یک کانال A و B )باشد که به منظور تعیین چرخش تنظیم می شوند. اساس کار انکودرهای افزایشی نوری، تولید قطار پالس مربعی یا بعضا موج سینوسی در دو کانال A و B است. این دو کانال در این وسیله اصلی ترین نقش را ایفا می نمایند که با هم دارای 90 درجه اختلاف فاز الکتریکی و مکانیکی هستند. تعداد این پالس ها در هر دور گردش، معنای رزولوشن انکودر (Encoder Resolution) را تعیین می کند.
نکته مهم در رمزگذاری یک انکودر افزایشی، نقاط مرجع است. این علائم به عنوان راهنمای این وسیله عمل می کنند به صورتی که پس از خاموش کردن برق در دستگاه، تمام داده ها از بین می روند، از این رو، هر گزارش جدید هر بار از صفر شروع می شود، زیرا همه علامت ها برای حسگر یکسان هستند. هنگامی که حسگر از یک نقطه مرجع عبور می کند، کنترلر اطلاعاتی در مورد مقدار فعلی انکودر، در این نقطه دریافت می کند.
مزایای انکودر افزایشی:
- ساختار ساده
- قیمت مناسب
- تشخیص آسان سرعت و جهت
معایب انکودر افزایشی:
- نیاز به هومینگ و تعیین یک نقطه مرجع
- نتایج در صورت قطعی برق از بین خواهند رفت.
انکودر ابسولوت
انکودر مطلق موقعیت زاویه ای دقیق شفت را اندازه گیری می کند در حالی که انکودر افزایشی تغییر موقعیت زاویه ای را اندازه گیری می کند. این انکودر این عملیات را با استفاده از یک حسگر نوری، مغناطیسی یا خازنی و ارسال یک کد منحصر به فرد هر موقعیت از دیسکی که توسط شفت می چرخد، انجام می دهد. نکته مهم این است که یک انکودر مطلق میتواند این کار را بدون نیاز به چرخاندن شفت، انجام دهد و هر چه دقت و تعداد سنسور های شمارش و به قل معروف بیت های انکودر بیشتر باشد، خواندن موقعیت شفت دقیق تر خواهد بود.

میتوان مطلق یا افزایشی بودن انکودر را در هنگام روشن شدن آن فهمید؛ اگر این وسیله مجبور باشد برای تعیین موقعیت خود از طریق تکان دادن شروع به حرکت کند، آنگاه افزایشی است اما اگر موقعیت واقعی خود را بدون حرکت نشان دهد، مطلق است.
انکودر های مطلق یا ابسولوت در دو نوع تک دور (سینگل ترن) و چند دور (مولتی ترن) ارائه می شوند. انکودر تک دور داده های موقعیت یابی را در یک دور کامل 360 درجه نمایش داده و در دور های بعدی تنها همان مقدار اولیه را نمایش میدهد در حالی که انکودر چند دور دارای یک شمارنده اضافه میباشد که میتواند در هر تعداد دوری موقعیت خود را حفظ و مقادیر را نمایش دهد. انکودر مطلق نسبتا دقت اندازه گیری مناسبی دارد و این عملکرد به تعداد سنسور ها وابسته است.

از مزایای انکودر مطلق میتوان به موارد زیر اشاره نمود:
- از دست ندادن موقعیت خود پس از قطع برق و موقعیت یابی مداوم
- عدم نیاز به پشتیبان گیری باتری برای جلوگیری از از دست دادن اطلاعات
- امکان استفاده در عملیات هایی که نیاز به ایمنی عملکردی دارند
- دارای رابط چندگانه مانند آنالوگ، اترنت، فیلدباس
تفاوت انکودر مطلق و افزایشی
انکودر های افزایشی نمی توانند پس از خاموش کردن دستگاه، موقعیت قبلی و واقعی خود را داخل خود نگه دارند در حالی که نوع مطلق در هر نقطه و موقعیت که باشند سیگنالی که در خروجی برای کنترلر ارسال می کند، بیانگر همان مکان می باشد. به دلیل اینکه یک انکودر مطلق موقعیت دقیق شفت را حفظ می کند، به محض اینکه برق را به آن اتصال دهید، موقعیت آن مشخص شده و نیازی به کالیبراسیون ندارد. همچنین این وسیله هنگام قطع برق، میتواند اطلاعات موقعیت مورد نیاز را حتی اگر شفت در زمانی که این وسیله خاموش بود، چرخانده شده باشد، را نمایش دهد.
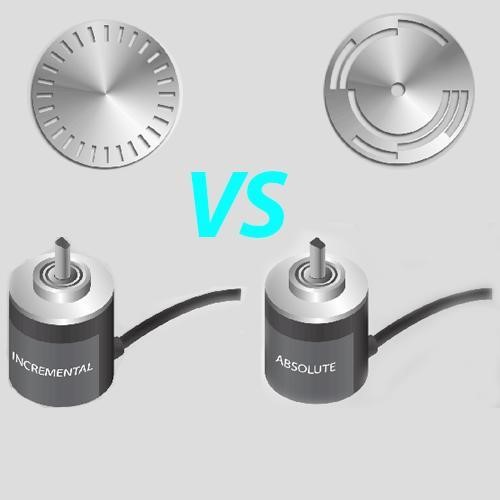
انکودر افزایشی، پیچیدگی کمتری نسبت به مدل های مطلق دارد و بنابراین معمولاً ارزان تر هستند؛ اگر فقط سرعت، جهت حرکت یا موقعیت نسبی برای کاربر مهم باشد، انکودر افزایشی معمولا بهترین گزینه است، اما زمانی که موقعیت دقیق دغدغه اصلی باشد، نوع مطلق گزینه مناسبی است.
تفاوت تاکوژنراتور و انکودر
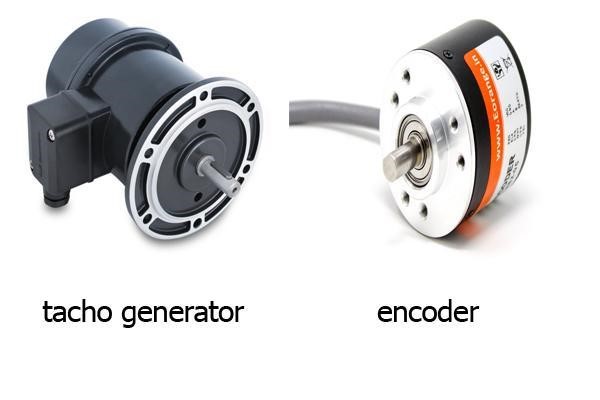
تاکوژنراتورها مانند ژنراتورهای استاندارد، یک ولتاژ AC متناسب با سرعت را تولید میکنند که به صورت موج فرکانسی است و میتوان به وسیله این موج سرعت یک الکتروموتور را کنترل نمود. در حالیکه انکودر موقعیت دورانی موتور را استخراج کرده و آن را به سیگنال آنالوگ یا دیجیتال تبدیل می کند. همچنین این وسیله می تواند اطلاعاتی را در مورد موقعیت شفت دریافت کرده و سرعت را محاسبه کنند، بنابراین از این نظر نسبت به یک تاکوژنراتور ساده، کاربردی تر میباشد. در واقع تاکوژنراتور فقط اطلاعات سرعت شفت را می دهد در حالی که انکودر اطلاعات موقعیت موتور الکتریکی را نمایش میدهد.






