

فهرست این مقاله ( با کلیک روی هر عنوان به آن قسمت منتقل می شوید)
انتخاب الکتروموتور مناسب
برای انتخاب صحیح الکتروموتور نیاز به انجام یک سری محاسبات است. مثلا شما باید بدانید به موتور الکتریکی با چه توانی نیاز دارید، سرعت و گشتاور مورد نیاز شما چقدر است، آیا برای کار خود نیاز به کنترل موقعیت، سرعت یا گشتاور دارید یا خیر؟ این موتور قرار است در چه شرایط محیطی کار کند و ... در این مقاله ما به شما می آموزیم که با توجه به مکانیزم خود همه این اطلاعات را محاسبه کنید و در انتها میتوانید موتور مناسب خود را انتخاب کنید.
توان موتور
انرژی انواع مختلفی دارد. مثلا در یک لامپ ورودی انرژی الکتریکی و خروجی انرژی روشنایی است. ما به وسیله ابزارهای مختلف، انرژی را از یک حالت به حالت دیگر تبدیل میکنیم. مثلا موتور الکتریکی انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. در یک خودرو، انرژی سوخت را به انرژی مکانیکی تبدیل میکند. در ژنراتور انرژی مکانیکی به انرژی الکتریکی تبدیل میکند. پس در هر وسیله یک انرژی ورودی و یک انرژی خروجی وجود دارد.
واحد انرژی توان است. در یک وسیله برای انجام محاسبه اینکه چقدر ورودی داده ایم و چقدر خروجی گرفته ایم، با واحد توان صحبت میکنیم. مثلا در یک لامپ رشته ای 400 وات انرژی الکتریکی میدهیم و 20 وات انرژی روشنایی تحویل میگیریم. همیشه به علت وجود یکسری تلفات، انرژی خروجی کمتر از انرژی ورودی است. به درصد اختلاف انرژی ورودی و خروجی، راندمان دستگاه گفته میشود. رتبه بندی مصرف انرژی دستگاه ها نیز بر اساس راندمان آن ها است.
محاسبه توان موتور الکتریکی
ورودی الکتروموتور انرژی الکتریکی است و خروجی آن انرژی مکانیکی. آنچه که برای ما اهمیت دارد خروجی موتور الکتریکی است، در نتیجه باید توان انرژی مکانیکی را محاسبه کنیم. توان موتور الکتریکی از رابطه زیر قابل محاسبه است.
قدرت × سرعت = توان انرژی مکانیکی
توان انرژی مکانیکی از رابطه فوق محاسبه میشود اما باید به این نکته توجه داشت که نوع انرژی مکانیکی در محاسبات اثر گذار است. انرژی مکانیکی به دو نوع انرژی مکانیکی خطی و انرژی مکانیکی دورانی تقسیم میشود.
(نیوتن)قدرت خطی × (متر بر ثانیه)سرعت خطی = (وات)توان انرژی مکانیکی خطی
(نیوتن متر)قدرت دورانی × (رادیان بر ثانیه)سرعت دورانی = (وات)توان انرژی مکانیکی دورانی
نکته: در صنعت برای توان های پایین معمولا بجای استفاده از واحدهای رادیان بر ثانیه و نیوتن متر از واحدهای دور بر دقیقه و کیلوگرم سانتی متر استفاده میشود که برای تبدیل این واحدها به واحدهای بکار رفته در فرمول محاسبه توان، کافی است آن ها را در عدد 10 ضرب کنیم.
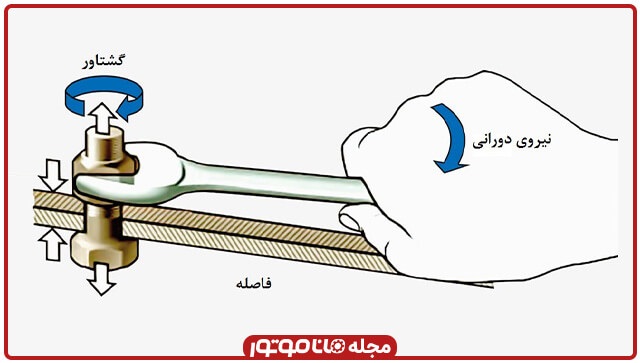
مفهوم گشتاور به زبان ساده
به قدرت دورانی گشتاور میگویند. برای درک بهتر مفهوم گشتاور، یک شیر گاز را در نظر بگیرید. برای باز کردن شیر گاز لازم است که در فاصله یک سانتی متری از از آن، نیروی 2 کیلوگرم به آن وارد شود. به عبارت دیگر به گشتاوری برابر با 2 کیلوگرم سانتی متر برای باز کردن شیر گاز نیاز است. اما اگر بخواهیم از 2 کیلوگرم کمتر مثلا 200 گرم نیرو وارد کنیم باید فاصله را زیاد کنیم. چون نیرو 0.1 شده است پس باید فاصله 10 برابر شود یعنی در فاصله 10 سانتی متری، 200 گرم نیرو معادل 2 کیلوگرم سانتی متر گشتاور وارد کنیم تا شیر گاز باز شود. پس برای انجام یک حرکت دورانی به گشتاوری مشخص نیاز است.
فرض کنیم میخواهیم این شیر گاز را به صورت اتوماتیک با یک موتور باز و بسته کنیم و میخواهیم عمل باز یا بسته کردن شیر گاز با سرعت 20 دور بر دقیقه انجام شود. در نتیجه به یک موتور با توان 0.4 وات نیاز است. اما با توجه به وجود تلفات، به گشتاوری بیشتر از مقدار محاسبه شده نیاز است. همچنین باید به این نکته توجه کرد که موتور باید دقیقا در مرکز محل گردش نصب شود.
محاسبه گشتاور موتور الکتریکی
در هنگام به دست آوردن گشتاور مورد نیاز برای مکانیزم خود باید نکات زیر را مدنظر قرار دهید.
الف) گشتاور مکانیزم حرکتی می بایست به دقت محاسبه شود و نیاز به مشاوره با مهندس مکانیک دارد. زیاد دیده شده است که مهندسین برق از فرمولهایی که به مبانی آنها تسلط کافی ندارند، استفاده کرده و گمراه می شوند.
ب) گشتاور مورد نیاز مکانیزم خود را بر حسب نیوتن.متر یا کیلوگرم.سانتیمتر محاسبه نمایید. زیرا کاتالوگ موتورها عمدتا بر اساس این دو واحد تنظیم شده اند.
ج) بین گشتاور راه اندازی، گشتاور نامی و گشتاور حداکثر تفاوت وجود دارد. به این تفاوتها دقت کنید.
د) در مکانیزمهای لخت (با اینرسی زیاد) یا مکانیزمهایی با شتاب مثبت راه اندازی بالا، حتما گشتاور مربوط به لختی موتور و بار را هم در محاسبه وارد نمایید. ولی در شتابهای خیلی کم و بارهای با اینرسی پایین می توانید از آن صرف نظر کنید.
ه) کنترل گشتاور موتور، با کنترل جریان مصرفی موتور صورت می گیرد و بهترین راه برای این کار، استفاده از سرو موتور هاست که این قابلیت در بیشتر سرو موتورهای AC وجود دارد.
و) در انواع مختلف موتورها، قیمت موتور و همچنین سایز موتور به نسبت گشتاور آن تغییر می کند، بنابراین محاسبه هر چه دقیق تر آن، طراحی شما را بهینه تر خواهد نمود.
ز) بالا بردن توان موتور و نسبت گیربکس لزوما به بالا رفتن گشتاور اعمالی منجر نمی شود. باید به حداکثر گشتاور قابل تحمل گیربکس نیز توجه نمود.
فرمول محاسبه گشتاور مورد نیاز
به طور کلی گشتاور موتور از رابطه زیر به دست می آید.
فاصله × نیروی محوری = گشتاور
که در این رابطه منظور از فاصله، همان شعاع دورانی است. به طور مثال فرض کنیم یک قرقره به شعاع 5 سانتی متر قرار است بسته ای به وزن 20 کیلوگرم را بالا بکشد. برای این کار به گشتاوری به صورت زیر مورد نیاز است:
کیلوگرم سانتیمتر 100 = 5×20 = گشتاور
اما باید به این نکته توجه داشت که کشیدن بار در حالت افقی کمتر از کشیدن بار در حالت عمودی نیروی محوری لازم دارد و گشتاور در حالت افقی ضریبی از گشتاور در حالت عمودی است که این ضریب، ضریب اصطکاک است. ضریب اصطکاک معمولا بین 0.03 (برای سطوح صاف) تا 0.2 (برای سطوح خشن) در نظر گرفته میشود. محاسبه مثال قبل را برای حالتی که قرقره قرار است بسته را روی زمین بکشد:
نیوتن متر 2 = کیلوگرم سانتیمتر 20 = 5×0.2×20 = گشتاور
نکته:اگر جسمی که کشیده میشود چرخ داشته باشد، مثلا بخواهیم یک گاری را بکشیم، گشتاور لازم برای آن نسبت به گشتاور لازم برای حالتی که جسم چرخ ندارد، کمتر میشود. به این حالت غلطش گفته میشود. گشتاور غلطش ضریبی از گشتاور کشش است.
ضریب اصطکاک بر روی سطح آسفالت 0.2 است، ضریب غلطش لاستیک بر روی آسفالت یک پنجم آن یعنی 0.04 است و برای چرخ فولادی روی فولاد یک دهم آن یعنی 0.02 است. برای مثال گشتاور مثال قبل برای حالت غلطش به صورت زیر محاسبه میشود:
کیلوگرم سانتیمتر 4 = 5×0.04×20 = گشتاور چرخ لاستیکی
کیلوگرم سانتیمتر 2 = 5×0.02×20 = گشتاور چرخ فولادی
نکته:محاسبات بالا با فرض این انجام شده است که موتور بیرون از گاری باشد و بخواهد گاری را بکشد. اما اگر موتور را بر روی چرخ گاری نصب کنیم، شعاع دورانی بجای شعاع شفت موتور، شعاع لاستیک گاری در نظر گرفته میشود.
همچنین بخوانید: سروو موتور چیست
سرعت الکتروموتور
الف) تعیین کنید که سرعت ثابتی مد نظر شماست یا به یک رنج سرعت احتیاج دارید. طبیعتا انتخاب سرعت متغیر هزینه بیشتری دارد.
ب) اگر نیازی به سرعت متغیر ندارید، حدود سرعت ثابت مطلوب خود را بر حسب دور بر دقیقه محاسبه نمایید و از سرعتهای کمتر از 10 و مابین 500 تا 1000 و بیش از 3000 دور بر دقیقه، که معمولا هزینه بیشتری به شما تحمیل می کنند، بپرهیزید.
ج) اگر به سرعت متغیر نیاز دارید، رنج حداقل و حداکثر آن را با دقت انتخاب کنید، رنجهای وسیع تر هزینه و دردسر بیشتری را طلب می کند.
د) دقت کنترل سرعت بترتیب در سروو موتور، استپ موتور، الکتروموتور AC و الکتروموتور DC بیشتر است.
ه) در موتورهای DC و AC (علی الخصوص DC)، به ویژه وقتی موتور را بدون گیربکس استفاده می کنید، به اختلاف بین سرعت بی باری و سرعت تحت بار دقت کنید.
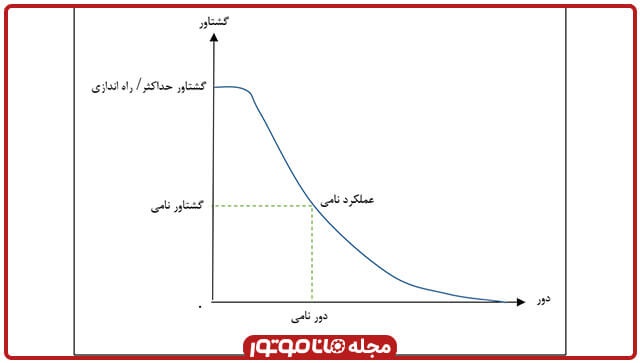
منحنی گشتاور سرعت
این منحنی به ما نشان میدهد که یک موتور در دورهای مختلف چه گشتاوری تحویل میدهد.
منحنی گشتاور سرعت موتور dc
منحنی گشتاور سرعت موتور DC در زیر آورده شده است.
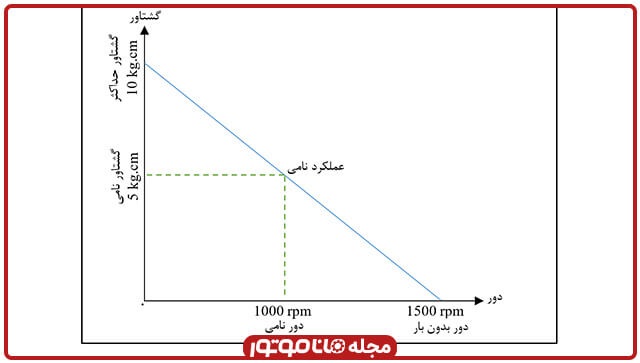
از نمودار بالا میفهمیم که موتوری که نمودار مربوط به آن است برای سرعت 1000 دور و گشتاور 5 کیلو طراحی شده است. در حقیقت دور نامی و گشتاور نامی آن برابر این مقادیر است. در نقطه ای که دور صفر است، گشتاور حداکثر را نشان می دهد یعنی به حدی بار بر روی موتور است که موتور نمیتواند آن را به حرکت درآورد و بیشترین نیروی خود را اعمال میکند. در نقطه ای که گشتاور صفر است دور بدون بار را نشان میدهد زیرا در حالتی موتور گشتاوری ندارد که باری روی آن نیست.
همانطور که از نمودار بالا هم مشخص است، در موتورهای DC گشتاور نامی حدود 2 تا 3 برابر بیشتر از گشتاور راه اندازی است.
گشتاور نامی < گشتاور راه اندازی = گشتاور حداکثر
یکی از علت های استفاده از موتورهای DC همین موضوع است که گشتاور راه اندازی آن ها بزرگتر از گشتاور نامی آن ها است.
نکته:در الکتروموتورهای DC فقط ولتاژ و جریان مطرح است اما در موتور AC فرکانس هم وجود دارد که با دور نسبت دارد.
منحنی گشتاور سرعت موتور AC تک فاز معمولی
منحنی گشتاور سرعت الکتروموتور تک فاز AC معمولی در زیر آورده شده است.
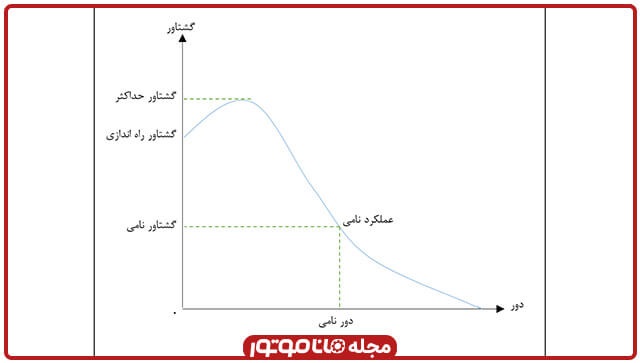
در موتورهای AC تک فاز معمولی، گشتاور حداکثر در حین فعالیت موتور اتفاق می افتد و نه در ابتدای شروع فعالیت آن. در نتیجه موتور AC تک فاز معمولی مطلقا مناسب راه اندازی اولیه نیست و مناسب پروژه هایی است که در آن ها به گشتاور راه اندازی زیادی احتیاج نداریم مانند فن ها.
در موتور AC تک فاز معمولی، گشتاور راه اندازی معمولا نصف گشتاور نامی است و روابط زیر برقرار است:
گشتاور نامی0.5 = گشتاور راه اندازی < گشتاور حداکثر
نکته:در پروژه هایی که به گشتاور راه اندازی زیادی نیاز است مانند بالابر مغازه ها، نمیتوان از موتور AC تک فاز معمولی استفاده کرد. برای این موارد باید از موتور AC تک فاز کلاچدار یا اصطلاحا دو خازن استفاده کرد. نحوه عملکرد موتور کلاچدار به این صورت است که در موتور AC دو خازن وجود، از آنجا که در موتورهای AC هم روتور و هم استاتور سیم پیچ هستند، خازن اول وظیفه ایجاد تاخیر فاز را دارد یعنی بین تغییر قطب های سیم پیچ ها فاصله زمانی قرار میدهد تا سیم پیچ ها بتوانند بچرخند. خازن دوم خازن راه انداز است که ظرفیت بالایی دارد که وجود این خازن باعث میشود که در لحظه اول راه اندازی، موتور گشتاور بیشتری را به وجود بیاورد و بعد از آن، خازن دوم از مدار خارج میشود زیرا اگر در مدار باقی بماند سیم پیچ موتور داغ میشود و به موتور آسیب میرسد.
منحنی گشتاور سرعت موتور AC تک فاز دو خازن کلاچدار
منحنی گشتاور سرعت موتور تک فاز دو خازن کلاچ دار AC در زیر آورده شده است.
در موتورهای دو خازن بر خلاف موتورهای معمولی، مشکل گشتاور راه اندازی کم را نداریم. در این نوع موتورها رابطه زیر برقرار است:
تقریبا دو برابر گشتاور نامی = گشتاور راه اندازی = گشتاور حداکثر
در صنعت غیر از فن و پمپ، اگر دید جایی موتور AC تک فاز استفاده شده است، از نوع دوخازن کلاچدار است.
منحنی گشتاور-دور برای موتورهای AC سه فاز
در الکتروموتور سه فاز AC، عملکرد مشابه موتور DC است به این صورت که:
تقریبا دو برابر گشتاور نامی = گشتاور راه اندازی = گشتاور حداکثر
علت استفاده از موتور سه فاز در آسانسورها نیز همین است که موتور آسانسور باید گشتاور راه اندازی بالایی داشته باشد.
نکته: مزیت موتور سه فاز نسبت به تک فاز علاوه بر گشتاور راه اندازی بالا این است که در توان های یکسان، جریان کمتری مصرف میکند.
همچنین بخوانید: استپ موتور چیست و چگونه کار می کند؟ (مفاهیم اصلی و کاربردها)
دقت الکتروموتور
الف) اگر در حرکتی که مد نظر است با الکتروموتور انتخابی انجام شود، دقت موقعیت لازم است و می بایست در موقعیتهای خاصی توقف صورت گیرد، دقت آن می بایست بر حسب درجه مشخص گردد. مثلا 0.05± درجه
ب) اگر نیاز به کنترل سرعت موتور وجود دارد، می بایست حداقل و حداکثر سرعت و دقت آن تعیین گردد. مثلا از 10 تا 50 دور بر دقیقه با دقت 2± دور بر دقیقه.
ج) مشخص کنید که برای حرکت مد نظر، فیدبک موقعیت یا سرعت موتور نیز لازم است یا خیر.
بطور معمول در حرکتهایی با سرعت کم، یا حرکت بارهای با اینرسی پایین و یا در جاهایی که با میکروسوییچ یا سنسور امکان تعیین موقعیت وجود دارد، می توان از فیدبک موتور صرف نظر نمود.
د) دقتهای بالا در کنترل موقعیت و کنترل سرعت و همچنین رنج وسیع سرعت (اختلاف زیاد بین سرعت حداقل و حداکثر) غالباً هزینه های بالاتری را به شما تحمیل می نماید. بنابراین بهتر است در تعیین این اعداد، دقت کافی را داشته باشید.
کنترل موقعیت، سرعت و گشتاور
الف) کنترل گشتاور، در کاربردهایی نظیر کشش یک نخ، کابل یا پارچه به دور یک غلتک (یا موارد مشابه...)، مطرح می شود و منظور از آن تنظیم سرعت موتور، جهت محدود کردن گشتاور اعمالی به یک مقدار مشخص است. همچنین با افت کشش، سرعت افزایش می یابد تا کشش مد نظر حفظ شود.
کنترل گشتاور موتور، توسط کنترل جریان مصرفی آن صورت می گیرد و اغلبِ سروو موتورهای AC دارای این مد کنترلی بر روی درایور خود هستند.
ب) کنترل سرعت توسط انواع موتورها قابل انجام است، اما این موضوع در مورد موتور DC ارزانتر و ساده تر صورت می پذیرد.
در مورد موتورهای ایسی سه فاز، با اینورتر کنترل دور فرکانسی امکان پذیر است.
در مورد استپ موتورها و سرو موتورها هم، این امکان با تنظیم فرامین ارسالی (پالس، ولتاژ آنالوگ یا فرامین شبکه) به درایور موتور امکانپذیر است.
کنترل دور موتورهای تک فاز ایسی بدلایل ساختاری، چندان منطقی نیست.
ج) کنترل سرعت های بسیار دقیق با ضریب خطای بسیار پایین را (که ندرتا بکار می آید) می توان با موتور براشلس و با صرف هزینه زیاد انجام داد.
د) کنترل موقعیت (کنترل زاویه) به دو صورتِ حلقه باز (توسط استپ موتورها) و حلقه بسته (توسط سرو موتورها) امکانپذیر است. دقت کنترل موقعیت در استپ موتورها به رزولوشن درایور و در سرو موتورها به دقت انکدر متصل بر روی موتور بستگی دارد.
کنترل موقعیت می تواند نسبی (incremental نسبت به فرامین قبلی) و یا مطلق (absolute نسبت به نقطه صفر) باشد و این موضوع را نوع انکدر موتور مشخص می کند.
ه) کنترل موقعیت، به نوعی شامل کنترل سرعت هم می شود.
و) اضافه کردن گیربکس بدلیل لقی های مکانیکی دنده ها، از دقت کنترل موقعیت می کاهد، مگر در بارهای (مثلاً) عمودی که لقی همیشه در یک طرف خنثی می شود.
برای بهتر دیدن جدول، موبایل خود را به صورت افقی نگه دارید.
| گشتاور | دقت | سرعت | گزینه پیشنهادی |
| زیاد | زیاد | زیاد | بار افقی: سروو موتور + گیربکس خورشیدی بار عمودی: سروو موتور + گیربکس حلزونی بار دورانی افقی: سروو موتور + گیربکس Right Angle |
| کم | ایزی-سرو (استپ موتور انکودردار) | ||
| کم | زیاد | بار افقی و عمودی: استپ موتور + دنده شانه ای/فولی و تسمه/بال اسکرو بار دورانی افقی: سروو موتور + گیربکس حلزونی | |
| کم | استپ موتور | ||
| کم | زیاد | زیاد | سروو موتور |
| کم | ایزی-سرو (استپ موتور انکودردار) | ||
| کم | زیاد | بار افقی و عمودی: استپ موتور + دنده شانه ای/فولی و تسمه/بال اسکرو بار دورانی افقی: سروو موتور + گیربکس حلزونی | |
| کم | استپ موتور |
همچنین بخوانید: چگونه دستگاه CNC بسازیم؟ - آموزش تصویری در 16 گام
محدودیت تامین ولتاژ
الف) اگر به هر دلیل مجبورید از یک ولتاژ مشخص برای راه اندازی استفاده کنید، طبیعتا باید موتور مطابق با آن انتخاب شود، مگر آنکه مایل به استفاده از مبدلها باشید.
ب) اگر مجبورید از یک نوع ولتاژ مشخص استفاده کنید (دیسی یا ایسی) مقدار ولتاژ موتور را با دقت به این نکته انتخاب کنید که معمولا؛ ولتاژ بالاتر خطر برق گرفتگی انسانی را افزایش، ولی خطر جرقه و آتش سوزی را کاهش می دهد.
ج) اگر مجبور به استفاده از منابع غیر کنترل شونده ای مثل باتری یا برق شهر هستید، قرار دادن فیوز مناسب را فراموش نکنید.
د) اگر متراژ سیم رابط بین منبع ولتاژ و موتور شما بیش از حد می شود، باید محاسبات مربوط به افت ولتاژ را مد نظر داشته باشید.
ه) محدودیت جریان منبع تغذیه باعث می شود، گشتاور لازم توسط موتور تولید نشود، لذا به جریان حداکثر تغذیه و جریان نامی آن (که بترتیب متناظر با گشتاور ماکزیمم و نامی موتور است) دقت کنید.
و) در موتورهای دیسی می توان به طور موقت ولتاژ را افزایش داد تا توان و دور تولیدی موقتا افزایش یابد، که البته این موضوع از عمر موتور می کاهد،
همچنین می توان جهت کاهش دور و افزایش عمر، ولتاژ را کاهش داد، که البته توان تولیدی موتور نیز افت می کند.
انواع جریان
جریانی که موتور با آن کار میکند، با توجه به شرایطی که در آن قرار دارد، نام های مختلفی دارد. انواع جریان های کاری عبارت اند از: جریان بدون بار، جریان نامی، جریان حداکثر، جریان راه اندازی
جریان بدون بار: جریانی است که وقتی موتور هیچ فشار و باری روی آن نیست مصرف میکند. توان محاسبه شده در این شرایط نیز توان نامی گفته میشود.
جریان نامی: جریانی است که موتور تحت باری که برای آن تعریف شده مصرف میکند. مثلا در یک آسانسور 5 نفره، جریانی که موتور آسانسور وقتی 5 نفر را حمل میکند مصرف میکند را جریان نامی میگویند.
جریان حداکثر: وقتی موتور زور میزند و بیش از حد به آن با وارد میشود، جریانی مصرف میکند که به آن جریان حداکثر میگویند. مثلا در یک آسانسور 5 نفره، جریانی که موتور آسانسور وقتی 7 نفر را حمل میکند مصرف میکند را جریان نامی میگویند. جریان حداکثر با زمان تعریف میشود مثلا حداکثر یک دقیقه میتواند 5 آمپر را تحمل کند. به عبارت دیگر جریان حداکثر کوتاه مدت است و اگر موتور در یک مدت زمان طولانی با جریان حداکثر کار کند، آسیب میبیند.
جریان راه اندازی: در لحظه ابتدایی شروع حرکت، وقتی که موتور میخواهد شروع به کار کند، جریان بیشتری میخواهد که به آن جریان لحظه ای میگویند.
نکته 1: برای وسایل الکتریکی که دائم کار نیستند مثل جک برقی، جریانی که ذکر میشود جریان حداکثر است. به این دلیل که جک خطی برای اینکه دائم یک حرکت رفت و برگشتی را انجام دهد ساخته نشده و قرار است یک زاویه ای را تنظیم کند و خاموش شود و کارکرد آن لحظه ای است و در نتیجه نیازی هم به جریان نامی آن نیست و اگر همواره جریان حداکثر به آن وارد شود مشکلی پیش نمی آید.
نکته 2:جریان دیگری نیز با نام جریان خروجی وجود دارد که در وسایلی کاربرد دارد که خروجی آن ها جریان الکتریکی است، مانند منبع تغذیه و اینورتر و همان جریانی است که به ما تحویل میدهد.
تشخیص شرایط موتور از طریق مقدار جریانی که مصرف میکند
فرض کنید برای یک موتور آسانسور با ظرفیت 5 نفر، جریان بدون بار 2 آمپر، جریان نامی 25 آمپر و جریان حداکثر 40 آمپر ذکر شده است. این موتور نمیتواند زیر 2 آمپر مصرف کند. اگر آمپر متر زیر 2 آمپر را نشان داد یعنی یک جای کار ایراد دارد، یا منبع تغذیه مشکل دارد یا آمپر متر معیوب است. اگر مقدار 2 آمپر را نشان داد، یعنی آسانسور خالی است. اگر10 آمپر نشان داد، یعنی زیر 5 نفر، مثلا 2 نفر در آسانسور هستند. اگر 25 آمپر را نشان داد یعنی 5 نفر در آن هستند. اگر 30 آمپر نشان داد، یعنی بیش از 5 نفر در آسانسور هستند. اگر 40 آمپر را نشان دهد وضعیت خطرناک است و ممکن است موتور بسوزد.
نکته: ولتاژ با سرعت رابطه دارد و جریان با گشتاور به این صورت که هرچقدر به موتور بار بیشتری داده شود، جریان بیشتری میکشد و هرچه ولتاژ بیشتری به موتور داده شود، موتور با سرعت بیشتری به کار خود ادامه میدهد.
محدودیتهای زمان خاموشی موتور
الف) اگر نیاز است که پس از خاموشی موتور، بار امکان جابجایی داشته باشد (مانند دربهای اتوماتیک هنگام قطعی برق)، استفاده از کلاچهای مکانیکی یا موتور گیربکس شافت مستقیم یا موتور گیربکس حلزونی با نسب پایین الزامی است.
ب) اگر کنترل موقعیت بسیار دقیق مد نظر است و تغییر موقعیت مکانی موتور هنگام خاموشی باید رصد شود، استفاده از انکودر ابسولوت سینگل ترن یا مولتی ترن ضروری است.
ج) باید دقت نمود که چرخاندن موتور در حالت خاموشی می تواند جریان برگشتی به ادوات کنترلی وارد کند و آسیب برساند.
د) اگر نیاز است که در زمان خاموشی موتور، بار بدون حرکت باقی بماند (مانند جابجایی های عمودی یا مکانیزمهای در معرض باد)، استفاده از موتورهای ترمز دار یا گیربکس حلزونی که خاصیت خودقفلی دارند، الزامی است.
مفهوم خود قفلی
فرض کنید یک سطح شیب دار وجود دارد که یک جسمی روی آن قرار دارد. اگر شیب سطح خیلی زیاد باشد، جسم پایین می آید. در حدی از شیب، جسم لغزان است و با کوچک ترین تلنگری پایین میرود و از یک حدی به بعد جسم سر جای خود ثابت قرار میگیرد.
خود قفلی یعنی اینکه یک موتور به یک جسم وصل کنیم و بخواهیم با آن جسم را بالا بکشیم. تا زمانی که موتورکار میکند، جسم بالا می آید. زمانیکه موتور خاموش میشود، اگر جسم در جای خود ثابت بماند و حرکت نکند، گفته میشود که مکانیزم خود قفل است اما اگر جسم حرکت کرد و پایین رفت مکانیزم خود قفل نیست. بسته به پروژه ممکن است خود قفلی نیاز باشد یا به خود قفلی نیاز نداشته باشیم. معمولا در پروژه هایی که جهت حرکت عمودی است به خود قفلی نیاز است و در پروژه هایی که حرکت به صورت افقی است خود قفلی باعث دردسر است.
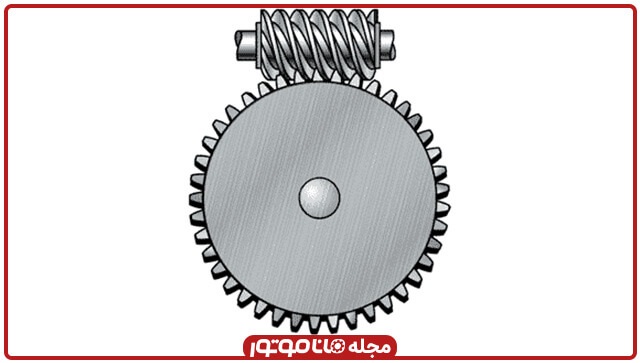
خود قفلی تنها در دو مکانیزم گیربکس حلزونی و پیچ و مهره و در برخی شرایط وجود دارد. خود قفلی در گیربکس حلزونی به این صورت است که هر چه هم نیرو وارد شود، دنده ها حرکت نمیکنند تا اینکه بشکنند. در پیچ و مهره در حالت بال اسکرو خود قفلی کامل وجود ندارد و به طور کلی هرچه طول گام بیشتر باشد، خود قفلی کمتر است. در گیربکس خود قفلی به نسبت گیربکس و میزان اصطکاک بستگی دارد. در سایر مکانیزم ها برای ایجاد خود قفلی میتوان از موتور ترمزدار استفاده کرد.
گیربکس حلزونی معمولا در نسبت های 60 و بیشتر حالت خود قفلی را دارد. همچنین گیربکس هایی که با کیفیت تر هستند و راندمان بیشتری دارند در نسبت های بالاتری حالت خود قفلی دارند زیرا دنده ها با کیفیت بیشتری ساخته شده اند و روغنی که بین آن ها وجود دارد با کیفیت تر است در نتیجه اصطکاک بین چرخنده ها در این نوع گیربکس ها کم است.
همچنین بخوانید: موتور DC چیست و چگونه کار میکند + فیلم آموزشی
عوامل غیرفنی اثرگذار بر انتخاب الکتروموتور
علاوه بر موارد ذکر شده، یکسری عوامل دیگری را هم باید در هنگام انتخاب الکتروموتور و دینام مد نظر قرار داد. این عوامل بیشتر وابسته به محیط کاری و شرایط محل کار هستند مانند دما، رطوبت، محدودیت های ابعادی و وزنی و ... . برای آگاهی کامل از این موارد لازم است تا در ابتدا با ساختار موتور به خوبی آشنا باشیم.
به طور کلی این عوامل به سه دسته زیر تقسیم میشوند:
شرایط محیطی شامل دما، رطوبت، گرد و غبار، ارتعاشات، ضد انفجار و ضد جرقه
نحوه اتصال شامل بدنه، فلنج و پایه
ابعاد و اندازه شامل سایز موتور، قطر شفت، طول شفت، تعداد سیم، وزن و نویز
ساختار و اجزا الکتروموتور
شکل زیر اجزا عمومی تشکیل دهنده یک موتور الکتریکی را نشان میدهد. هر نوع از موتورهای الکتریکی مانند موتور DC ، موتور AC ، استپ موتور ، گیربکس و ... این اجزا را در خود دارند.
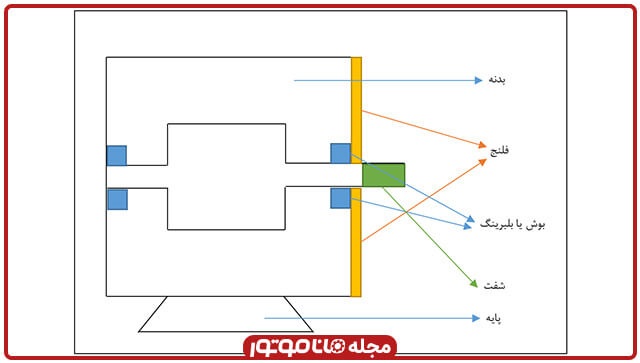
وسط موتور همواره در حال گردش است. هرچیزی که در جای خودش بچرخد، در آن یا بوش به کار رفته و یا بلبرینگ. تفاوت بوش و بلبرینگ در این است که بوش بدون ساچمه است و بلبرینگ ساچمه دارد. در بوش اصطکاک کمی وجود دارد و معمولا از برنج ساخته شده است و مانند چوب پنبه سطح آن متخلخل است. بوش نسبت به بلبرینگ ارزان تر است. معمولا در موتورهای با کیفیت در هر دو طرف از بلبرینگ استفاده میشود، در موتورهای با کیفیت متوسط به علت فشار زیادی که به شفت وارد میشود، در سمت جلوی موتور (شفت) از بوش و در سمت عقب بلبرنگ به کار میرود و در موتورهای بی کیفیت در هر دو طرف از بوش استفاده میشود.
دما:شامل دمای کارکردی و نگهداری است که معمولا دمای کارکردی محدودتر از دمای نگهداری است و مهم تر از آن هم هست.
رطوبت: شامل رطوبت نگهداری و کارکردی است که فقط مقدار حداکثر ذکر میشود زیرا رطوبت حداقل یعنی خشکی هوا که مشکلی در کارکرد موتور به وجود نمی آورد.
ضریب نفوذ ناپذیری:این ضریب را با شاخص IP نمایش میدهند که از IP00 شروع میشود و تا IP68 ادامه میابد. این ضریب نشان دهنده میزان نفوذ گرد و غبار، آب، دست و ... به درون موتور است. عدد اول مربوط به جامدات و عدد دوم مربوط به مایعات است.

ارتعاشات:بر اساس ضریب G (گرانش زمین) تعریف میشود. مثلا اگر ارتعاشات مجاز برای یک وسیله 0.5g است، یعنی اگر این وسیله تا 0.5g بلرزد، آسیبی نمیبیند. ممکن است برای یک وسیله این مقدار به صورت m/s25 تعریف شود. از آنجا که g=10m/s2 در نتیجه ارتعاشات مجاز برای این وسیله 0.5g است.
محدودیتهای ابعادی
الف) ابعاد موتور یکی از پارامترهایی است که در برخی طراحی ها انتخاب آن را دشوار می نماید. البته بهتر است در مراحل طراحی اولیه فضای کافی و حداکثری لحاظ شود تا انتخاب الکتروموتور با محدودیتهای کمتری مواجه شود.
ب) معمولا موتورهای دیسی، جثه کوچکتری، نسبت به موتورهای هم توانِ ایسی خود دارند.
ج) معمولا قطر موتور تاثیری با توان دو بر روی توان خروجی موتور دارد، ولی طول موتور با توان یک. بنابراین محدودیت در قطر مهمتر از محدودیت در طول است.
د) در میان موتورهای دیسی، موتورهای براشلس، در جثه های کوچکتر توان بسیار بالاتری را تولید می کنند.
ز) در میان موتورهای ایسی القایی، موتورهای سنکرون جثه کوچکتری نسبت به آسنکرون ها دارند.
سرو موتورهای ایسی موجود در بازار که از نوع سنکرون و روتور مغناطیس دائم هستند، در میان دیگر موتورهای ایسی، جثه بسیار کوچکتری دارند.
ط) در صورت نیاز به دور پایین و گشتاور بالا، استپ موتورها هم گزینه مناسبی محسوب می شوند.
و) باید دانست که در فضاهایی با محدودیتهای زیاد و در عین حال سرعت یا گشتاورهای بالا، می توان امکان استفاده از هیدروموتورها و ایرموتورها را نیز (بجای الکتروموتور) بررسی نمود.
ه) همانطور که در بندهای قبل ذکر شد، برخی اوقات استفاده از موتورهای سروو یا استپ یا براشلس می تواند صرفا بدلیل ابعاد کوچکتر آنها باشد، نه لزوما بدلیل قابلیت های کنترلی آنها.
ی) استفاده از موتورهای یونیورسال بکار رفته در لوازم خانگی و ابزارآلات برقی، که ابعاد و جثه کوچکی نسبت به توان بالای خود دارند، بدلایل مختلف (که خارج از حوصله این بحث است) در پروژه های صنعتی توصیه نمی شود.
نحوه اتصال
اتصال به یکی از این سه شکل انجام میشود: اتصال از بدنه، اتصال از فلنج، اتصال از پایه.
زمانی از اتصال فلنج استفاده میشود که بخواهیم موتور با دقت بالا به جایی وصل شود. اگر شفت موتور و گیربکس در هنگام اتصال کاملا هم مرکز نباشند باعث به وجود آمدن فشار میشود که بعد از مدتی بلبرینگ ها آسیب میبینند. بر روی فلنج قسمتی به نام نافی وجود دارد که با دقت ساخته شده و سطحی سیقلی دارد که هنگام اتصال موتور به گیربکس عمل هم مرکز کردن شفت موتور و گیربکس را انجام میدهد. قطر شفت و قطر نافی دو مقداری هستند که در کاتالوگ ها با دقت بالایی ذکر میشوند. وقتی موتور به گیربکس وصل میشود، نافی موتور روی نافی گیربکس مینشیند و از آنجا که نافی ها با دقت خیلی بالایی ساخته شده اند، شفت موتور و گیربکس دقیقا هم مرکز میشوند.
ابعاد فلنج ها از یک استاندارد جهانی پیروی میکند. مثلا اگر برای فلنج یک موتور کد 71B34 ذکر شده باشد، این کد تمام ابعاد و ویژگی های فلنج آن موتور را در خود دارد و فرقی نمیکند که برند سازنده چه باشد. در کد 71B34 عدد 71 نشان دهنده قطر نافی است، عدد 4 یعنی فلنج موتور کوچک است و عدد 3 به معنی این است که موتور پایه دارد پس این موتور از هم موتور و هم از فلنج میتواند وصل شود و اصطلاحا به آن پایه-فلنج میگویند اما این به این معنی نیست که همزمان موتور را از پایه و فلنج وصل کنیم و این کار استانداری نیست، یا باید موتور را از پایه وصل کرد و یا از فلنج.
سایز موتور
در موتورهایی که پایه دارند، بجای قطر، فریم در اندازه گیری ها در نظر گرفته میشود. از مرکز شفت موتور تا لبه ی پایه موتور را فریم موتور میگویند. مثلا وقتی گفته میشود موتور فریم 71 یعنی طول مرکز شفت تا لبه پایه موتور 71 سانتی متر است. فریم همان سایز موتور است.
جلوی موتور همیشه یا گرد است و یا مربعی. در اندازه گیری طول موتور، از جایی که موتور بسته میشود تا انتهای موتور را در نظر میگیرند یعنی اندازه شفت و ابعاد نافی در طول در نظر گرفته نمیشود و طول شفت از سر شفت تا فلنج است و نافی هم در طول شفت در نظر گرفته میشود و برای قطر شفت، ابعاد خار در نظر گرفته نمیشود. قطر شفت یکسری عدد استاندارد دارد که یا به اینچ گفته میشود و یا به میلیمتر. اعداد رایج برای قطر شفت شامل اعداد زیر است:
در شمارش تعداد سیم، یکی از سیم ها، سیم ارت است که نباید در نظر گرفته شود.
برای اینکه شفت موتور روی چیزی که فرو میرود سر نخورد و با آن درگیر شود، باید به نوعی این اتصال برقرار شود. انواع این نوع اتصال عبارت اند از:
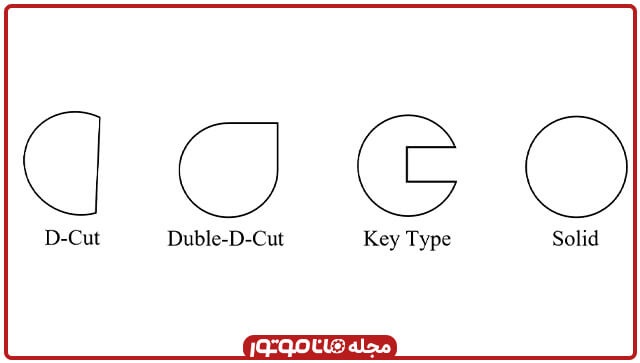
موتورهایی که ابعاد خیلی کوچکی دارند شفت آن ها از نوع solid است، بعد از آن شفت موتورهای بزرگ تر از نوع d-cut است، بعد از آن از نوع duble-d-cut است و شفت موتورهایی که ابعاد بزرگی دارند مثل موتورهای 25 وات و 40 وات و 60 وات، از نوع key type است.





